






ادامه سیمولینک سیستم های پیوسته و گسسته در متلبجمعه 04, سپتامبر 2020

سیمولینک(مفهوم شبیه سازی سیستم های دینامیکی) در متلب
در ادامه آموزش های سایت همیارپروژه برنامه نویسی متلب ارائه خواهد شد .آموزشها از مقدماتی تا پیشرفته ادامه دارد و ما به شما کدنویسی در نرم افزار متلب را یاد خواهیم داد. با ما همراه باشید.
سیستم های پیوسته و گسسته در متلب
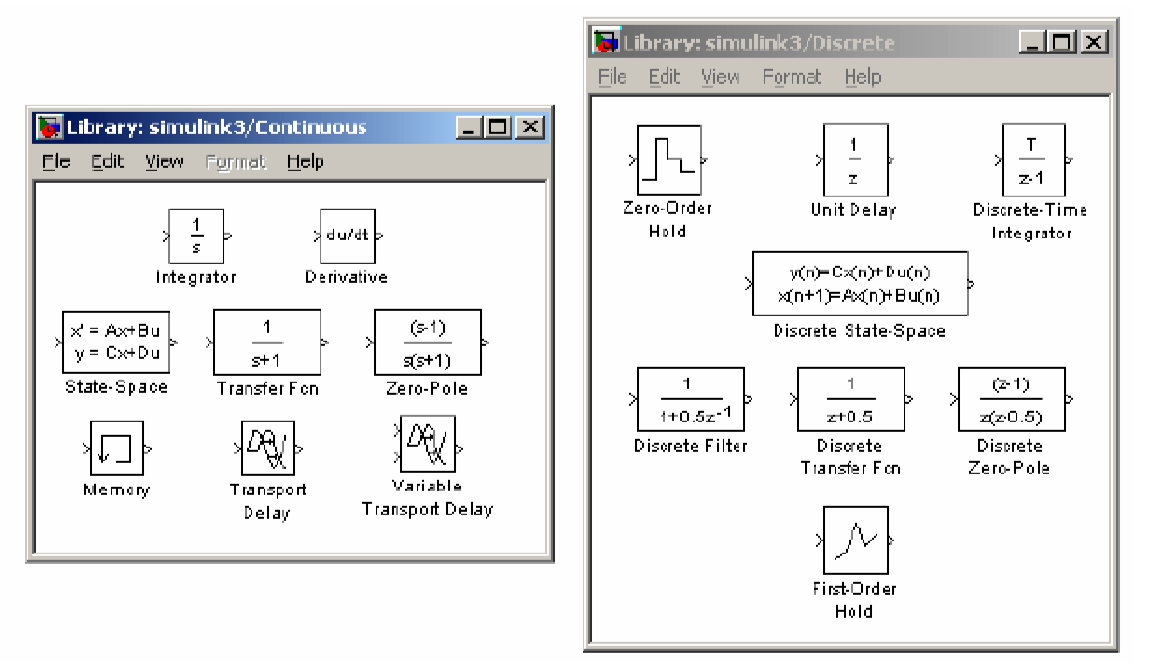
تمام سیستم های دینامیکی را می توان به عنوان سیستم هایی با زمان پیوسته و یا گسسته تحلیل نمود. نرم افزار سیمولینک به کار بر اجازه می دهد تا این سیستم ها را توسط توابع انتقال , بلوکهای تکاملی, بلوک های تاخیری و… نشان دهد.
شکل زیر بلوکهای سیستم های دینامیکی در دسترس را نشان می دهد. سیستم های گسسته را می توان در صفحه ی Z که مبین معادلات تفاضل می باشد, طراحی نمود. سیستم ها می توانند به شکل حالت-فضا نشان داده شوند که این شیوه ی نمایش در طراحی سیستم های کنترل مدرن بسیار سودمند خواهد بود.
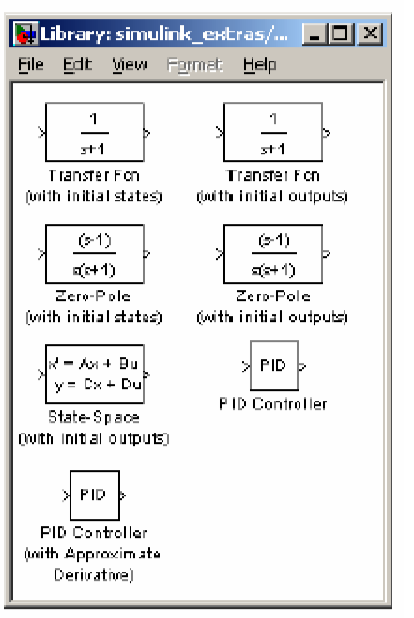
شکل زیر چندین بلوک خطی پیشرفته را در کتابخانه ی simulink Entras در متلب موجود می باشند, نشان می دهد. این بلوک ها شامل بلوکهای پیشرفته ی خاصی , مانند کنترل PID , توابع انتقال دارای شرایط اولیه و… می شوند.
یک سیستم جرم- فنر-دمپر
بخش زیر شامل مثالی برای ایجاد یک سیستم جرم- فنر- دمپر می باشد. این سیستم را می توان به دو شیوه ساخت:
نمایش حالت-فضا , که تئوری کنترل پیشرفته بکار می رود.
- نمایش تابع انتقال کنترل, سیستم جرم-فنر-دمپریک سیستم درجه دو می باشد که در اغلب سیستم های دینامیکی با آن مواجه می شویم. مدارهای الکتریکی, مقاومت-سلف-خازن (RLC) نیز مشابه این مثال خواهند بود و می توانند بعنوان سیستم های مرتبه دوم مدلسازی شوند.
این مثال در شکل زیر نشان داده شده است.
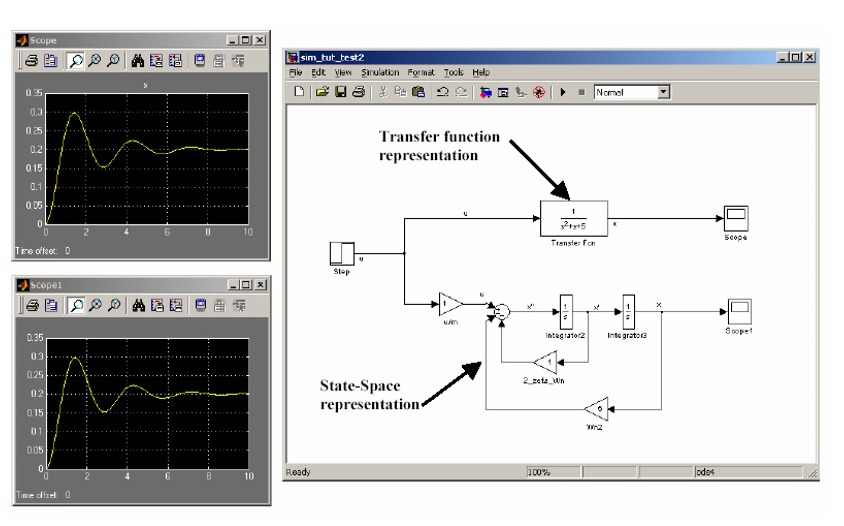
از یک تابع پله واحد جهت وروی سیستم کنترلی استفاده شده است. ( سیستم آورده شده در این مثال , حلقه باز می باشد). بخش بالایی بلوک شامل چگونگی نمایش تابع انتقال سیستم دینامیکی می باشد. در اینجا کاربر می تواند تنها خروجی ها را مشاهده کند و قادر به مشاهده و تحلیل حالتهای سیستم نخواهد بود. همچنین در این حالت کاربر قادر به اعمال شرایط اولیه ی غیر صفر روی سیستم نخواهد بود. ( البته با استفاده از بوک تابع انتقال خاصی که در جعبه ابزار Extras موجود می باشد می توان شرایط اولیه ی غیر صفر را نیز برای سیستم تعریف نمود) بخش پایینی دیاگرام سیمولینک, همان سیستم درجه دوم را بصورت نمایش حالت-فضا نشان می دهد. بالاترین مرتبه ی عشق ( در این مورد شتاب) بصورت تابعی از ورودیها و حالتهای دیگر نشان داده شده است. از این ورودی جهت تشکیل حالت با مرتبه ی مشتق کمتر , انتگرال گیری می شود. شرایط اولیه برای هر حالت را می توان در بلوک انتگرال گیر تعیین نمود. حالتها می توانند بصورت کاملا مجزا رویت شده و یا حتی اصلاح شوند.
یک سیستم جرم- فنر- دمپر با معادله ی دینامیکی زیر را در نظر بگیرید:
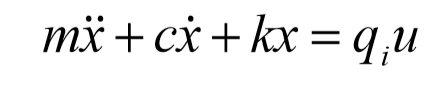
که در آن x متغیر خروجی, m جرم, C ضریب میرایی , K سختی فنر و u نیروی کنترل شده ( در اینجا در ثابت qi ضرب شده است) می باشد. این معادله را می توان در حوزه ی لاپلاس به صورت زیر نوشت:
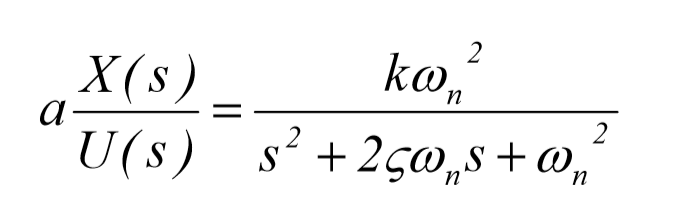
که در آن نسبت میرایی, فرکانس طبیعی و دامنه ی حالت پایدار به صورت زیر می باشد.

در شکل حالت – فضا , این سیستم بر حسب بالاترین مرتبه ی مشتقش نشان داده می شود.

معادلات فوق را می توان بر حسب میرایی و فرکانس طبیعی سیستم و با فرض qi=l به صورت:
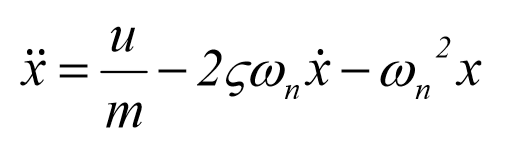
نوشت. در این مثال, با شرایط اولیه ی صفر , روش تابع انتقال و نمایش حالت- فضا منجر به نتایج یکسانی خواهند شد. در حالت کلی استفاده ی همزمان از دو روش ذکر شده ضرورتی ندارد. مراحل بدست آمده معادلات حالت- فضا در زیر آمده است:
معادله ی دیفرانسیل را برای بدست آوردن بالاترین مر تبه ی مشتق حل می کنیم. اگر معادله ی نرمالیزه نشده است, بالاترین مرتبه ی مشتق ممکن است شامل عبارتی به عنوان ضریبش باشد. در اینصورت تمامی مقادیر معادله را بر این عبارت تقسیم خواهیم کرد. اکنون بالاترین مرتبه ی مشتق با ضریب یک را سمت چپ تساوی و بقیه عبارات را در سمت راست تساوی قرار می دهیم.
- یک بلوک مقایسه کننده در پنجره سیمولینک متلب ایجاد کنید . بلوک باید به تعداد عبارتهای مثبت و منفی سمت راست علامت تساوی, به ترتیب دارای ورودیهای مثبت و منفی باشد ( در اینجا در سمت راست علامت تساوی سه عبارت وجود دارد که دو تای انها منفی می باشد, بنابراین به بلوک مقایسه کننده. دو ورودی منفی و یک ورودی مثبت می افزاییم.) خروجی بلوک جمع کننده باید مساوی عبارت شامل بالاترین مرتبه ی مشتق که در یک ثابت ضرب شده است, باشد. حال می توان معادله را در یک ضریب , ضرب و یا تقسیم نمود, تا ضریب بالاترین مرتبه ی مشتق معادله یک می شود.
- در این مرحله انتگرالگیرها را می افزاییم. تعداد کل انتگرالگیرها باید مساوی مرتبه ی معادله ی دیفرانسیل باشد. برای مثال, اگر یک سیستم مکانیکی با معادله ی دیفرانسیل مرتبه ی دو, حاکم بر آن داشته باشیم, و هدف بیان موقعیت سیستم باشد, نیاز به دو مرتبه انتگرال گیری وجود خواهد داشت. باید در انتها, بلوکی را نیز برای متغیر خروجی در نظر بگیریم.
- پس از هر انتگرال گیری, سیگنال را به مکان مناسبش در بلوک مقایسه کننده فیدبک می کنیم. در سمت راست هر انتگرال مقداری برابر با انتگرال مقدار سمت چپ آن وجوددارد. قبل از فیدبک کردن مقدار خروجی هر انتگرال گیر به مکان مناسبش در بلوک مقایسه کننده , باید از بلوک اندازه جهت ضرب کردن خروجی در مقدار ضربش استفاده شود.
توجه کنید که در نمایش حالت- فضای سیستم ها دسترسی به مشتقات مرتبه ی پایین تر ( حالت های سیستم) ممکن خواهد بود. این قابلیت , شیوه ی نمایش حالت- فضا را بصورت روشی بهتر برای توصیف سیستم های دینامیکی معرفی می کند. بعلاوه , در این شیوه سازگار ی سیستم با اجزای غیر خطی, ساده تر خواهد بود. روش ماتریس انتقال روشی ساده تر نسبت به نمایش حالت فضا می باشد ( زیرا در آن تنها از یک بلوک استفاده می شود.) اما این روش, دارای محدودیتهای بسیاری می باشد.
در اینجا آشنایی با محیط متلب بخش هشتاد و ششم به پایان رسیده است و در آموزش های بعدی به مباحث دیگر آموزش متلب می پردازیم. همچنین از شما مخاطبین عزیز سایت همیارپروژه دعوت می کنم که برای انجام پروژه متلب خود آموزش های ما را دنبال نمایید.
نویسنده: زهرا رستمی
دیدگاهتان را بنویسید